|
ระบบความปลอดภัย อุปกรณ์ความปลอดภัย
|
| อุปกรณ์ความปลอดภัยของเครนเหนือศีรษะแต่ละแบบ
แต่ละรุ่นและแต่ละขนาด (crane capacity) ก็จะแตกต่างกันออกไปตามข้อกำหนดของมาตรฐานและตามความต้องการของสภาพใช้งาน
อุปกรณ์ความปลอดภัยที่เกี่ยวข้องกับการทำงานของเครนและผู้บังคับเครนต้องทราบมีดังต่อไปนี้
|
|
- ระบบบังคับหยุดปลายรางเครนด้านหน้าและด้านหลัง
(limit
switch and mechanical stopper) ออฟชั่นสูงสุดจะมี ๓ ระดับคือ
|
- ลิมิทสวิทซ์ชะลอความเร็วและจำกัดความเร็ว
(slow-down
limit switch) เมื่อเครนถูกบังคับให้เคลื่อนที่ตามแนวราง
เดินหน้าหรือถอยหลังเกือบถึงปลายราง ลิมิท-สวิทซ์นี้จะส่งสัญญาณควบคุมให้ความเร็วลดลงและคงความเร็วที่ระดับต่ำกว่าความเร็วใช้งาน
- ลิมิทสวิทซ์หยุดเครนตามแนวราง (stop
limit switch) เมื่อเครนเคลื่อนที่ถึงลิมิท-สวิทซ์ตำแหน่งนี้
เครนจะหยุดทำงานไม่สามารถบังคับเครนให้เคลื่อนที่ไปสุดปลายรางไม่ได้
- แมคคานิกสต๊อปเปอร์ปลายราง (mechanical
stopper) เป็นหมอนแมคคานิกตัวสุดท้ายซึ่งติดตั้งไว้ที่ส่วนปลายรางเครนทั้งด้านเดินหน้าและปลายรางด้านถอยหลัง
กรณีที่ลิมิทสวิทซ์ซึ่งควบคุมความเร็วการเคลื่อนที่ของเครนขัดข้อง
เครนก็จะมากระแทกกับหมอนแมคคานิกปลายรางนี้ ดังนั้นที่อุปกรณ์นี้จะมีลูกยางกันชน (rubber
bumper) ประกอบร่วมอยู่ด้วย
|
- .ระบบบังคับหยุดทรอลเลย์
ก่อนเคลื่อนที่สุดปลายสะพานเครน (limit switch and mechanical
stopper) ออฟชั่นสูงสุดจะมี
๓ ระดับเช่นเดียวกับการทำงานของระบบบังคับหยุดปลายรางเครนด้านหน้าและด้านหลัง
- ระบบบังคับหยุดฮอยท์ที่ระดับสูงสุด
ต่ำสุด (lower
and upper limit switch) และโหลดลิมิทสวิทซ์ (hoist
load limit switch) ได้อธิบายไว้โดยละเอียดแล้วในหัวข้อระบบฮอยท์เครน
ลำดับนี้จึงไม่นำมากล่าวถึงอีก-เพื่อป้องกันการกระแทกชนในงานเครน
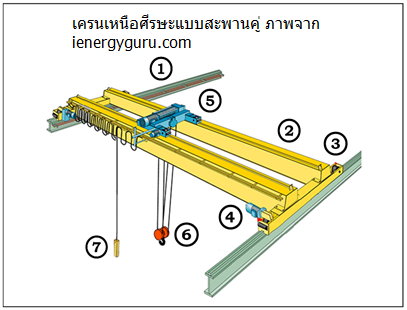
จะเห็นได้ว่า ๖ ทิศทางที่เครนเคลื่อนที่ทำงานคือซ้ายขวา หน้าหลัง ขึ้นลง
จะมีระบบควบคุมการหยุดครอบคลุมทั้งหมด
|
- .สัญญาณเตือนทำงาน
(working
alarm) เมื่อเครนเคลื่อนที่ตามแนวราบ
๔ ทิศทางต้องมีทั้งสัญญาณแสงและสัญญาณเสียง
สัญญาณที่กล่าวถึงนี้เป็นมาตรฐานเครนและกฎหมายประเทศด้วย
หมายความว่าหากไม่มีก็จะไม่เป็นไปตามมาตรฐานข้อกำหนดและฝ่าฝืนกฎหมายประเทศด้วย
- สัญญาณตัดวงจรหยุดฮอยท์เมื่อโหลดเกิน
(load
limit switch) เครนทุกตัวจะถูกปรับตั้งค่าสูงสุดในการยกโหลด
เมื่อโหลดที่ยกเกินฯ
โหลดลิมิทสวิทซ์จะส่งสัญญาณไปตัดวงจรการยกเพื่อหยุดการทำงานของฮอยท์
เครนจึงยกของขึ้นไม่ได้
|

|
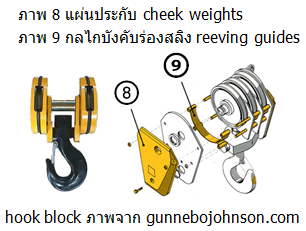
- แผ่นกันสลิงตกจากตะขอยก
(hook
safety
latch) เป็นแผ่นกระเดื่องถูกดันด้วยสปริงให้แนบชิดกับตะขอยก
ป้องกันสลิงที่ใช้ยึดเกาะวัสดุหลุดออกจากปากตะขอ
- การกำหนดแถบสีสะท้อนแสง
แถบเหลืองสลับดำ บนอุปกรณ์ช่วยยกที่สร้างขึ้นคามความเหมาะสมใช้งาน
เช่นบีมรูปตัวซีสำหรับยกเหล็กม้วน (c-hook),
ขาหนีบยกเหล็กม้วน
(coil
tong), ถังหูหิ้วยกด้วยเครน
(workbox)
บีมตรงหรืออุปกรณ์ช่วยยกรูปทรงอื่นๆ
|
ที่กล่าวถึงตัวอย่าง ๑-๗
เป็นระบบความปลอดภัยและอุปกรณ์ด้านความปลอดภัยส่วนหลักๆ ของเครนเท่านั้น
ต้องไม่ลืมว่าเครน อุปกรณ์ส่วนควบและอุปกรณ์ช่วยยกที่ใช้กับงานเครนมีหลากหลาย
ฉะนั้นอาจต้องศึกษาเพิ่มเติมจากคู่มือประจำเครื่องด้วย จะอย่างไรก็ตาม
หากเข้าใจสิ่งที่กล่าวถึงนี้ได้ ก็จะเป็นพื้นฐานมากพอที่จะทำความเข้าใจเงื่อนไขอื่นๆ
ได้
|

|







 สถิติวันนี้
สถิติวันนี้  สถิติเดือนนี้
สถิติเดือนนี้  สถิติปีนี้
สถิติปีนี้